Welcome to Dynamics & Autonomous Mobility Lab
Dynamics & Autonomous Mobility Lab. is a state-of-the-art dynamics based smart mobility research lab for graduate and undergraduate. We emphasize on novel technology related to smart mobility such as conventional vehicle, electric vehicle, flying car and spacecraft based on dynamics, control, deep learning and CFRP composite materials. Lab YouTube (click here to see what we are doing in the lab !!!)
Research Overview


Integration and Demonstration of Hardware and Software for Self-Driving Mobility : Our research on mobility covers from new concept design of mobility platform HW to autonomous driving SW. (HMC project, see details about mobility design and AI stereo-vision on the web) (Click to view)

Press Day (with Hyundai Motors)

In-wheel Motor Driven & Remote Controlled Smart Trailer; LTE Tele-Operation for driving EV platform; AI-based 3D object mapping using camera (Click to view)



Design, Control, Embedded and CFRP structure for Autonomous ground mobility (HMC project)

Leader-folling Control Algorithm for Platooning (HMC project)
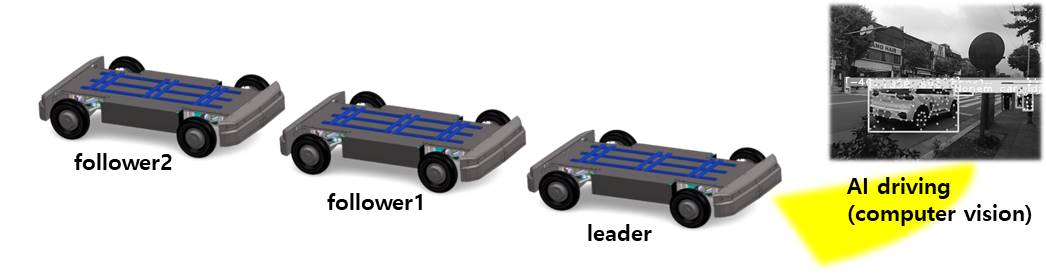
Vision-based autonomous driving (HMC project)

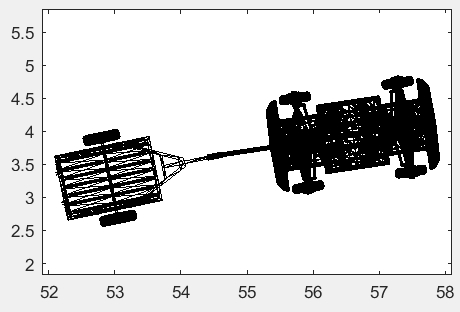
Torque Vectoring Control of Smart Trailer (HMC project)
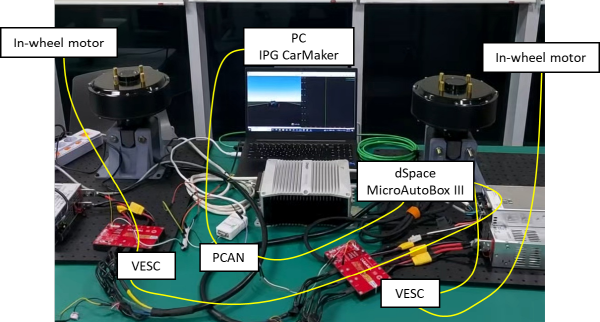
CameraImplementation of HILS Using IPG CarMaker and dSpace MicroAutoBox III (IPG,dSpace,UIC)
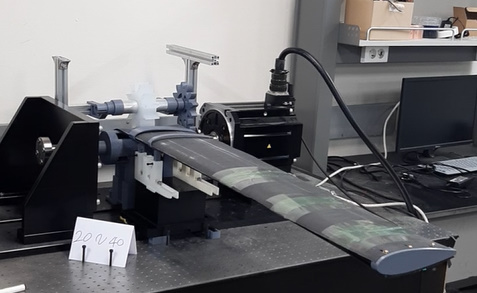
Tracking control of a ground vehicle-transformable VTOL with rollable CFRP wing (Lyapunov-function / Sliding mode control) (NRF project)
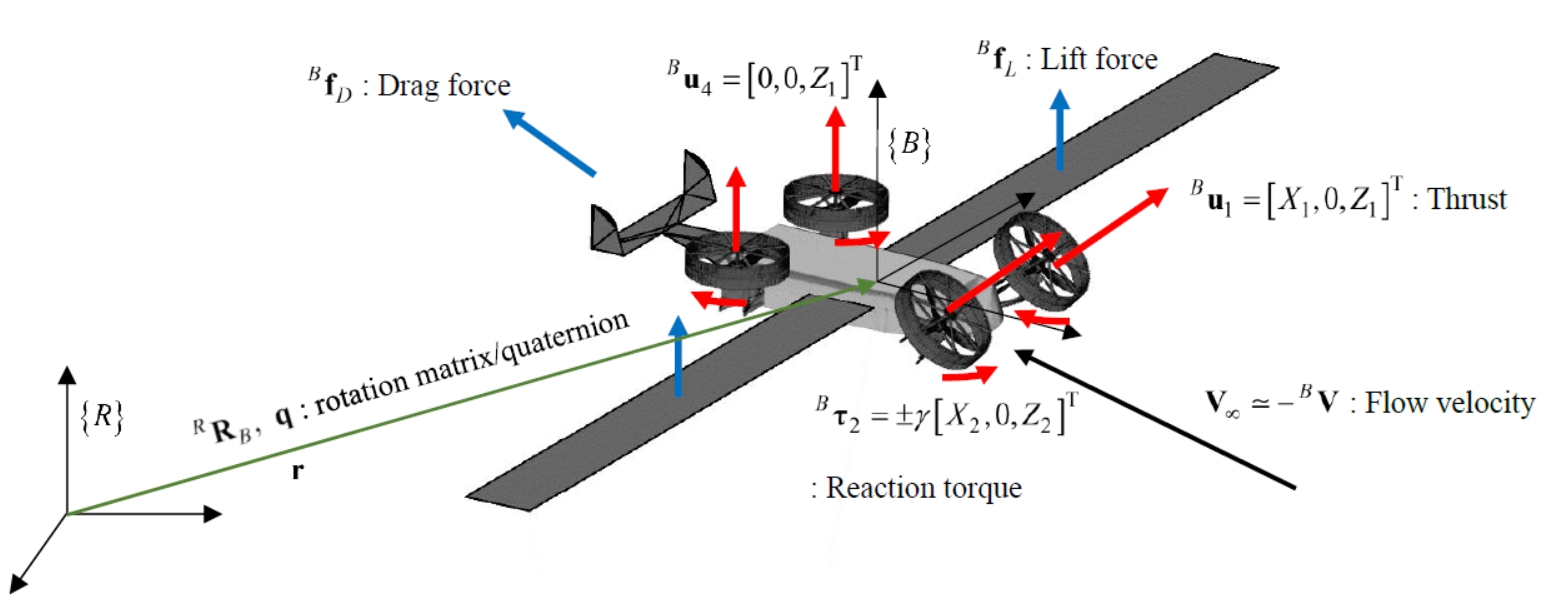
Rollable CFRP wing of UAV (HMC project)
Attitude Control of New Concept Solar Sail for Orbit Rising Demo Mission (NRF project)
MS and PhD student positions are available for those who are interested in working on design, dynamics & control of autonomous mobility and spacecraft. Please feel free to contact me directly: kangj@inha.ac.kr