Autonomous Driving
Autonomous driving mobility platform is under investigation in out lab. This technology requires two essential aspects: hardware and software. We develop both of them and integrate in optimal manner for autonomous driving. Most of all, software parts that we are pursuing incluses dynamic model-based optimal control with sensor fusion, navigation, deep learning and computer vision. It will allow autonomous driving of our hardware mobility platform.
- AI Autonomous Driving Platform
- Dynamics/mechanics based system design/modelling
- Development of MCU embedded EV platform
- Path tracking control for lateral/longitudinal motion of In-wheel driven EV
- Computer vision based object tracking and object point clustering

- Autonomous collision-avoidance control of leader car in platooning
- Computer vision based local path planning
- GPS-based global path planning
Sponsor: Hyundai Motor Company
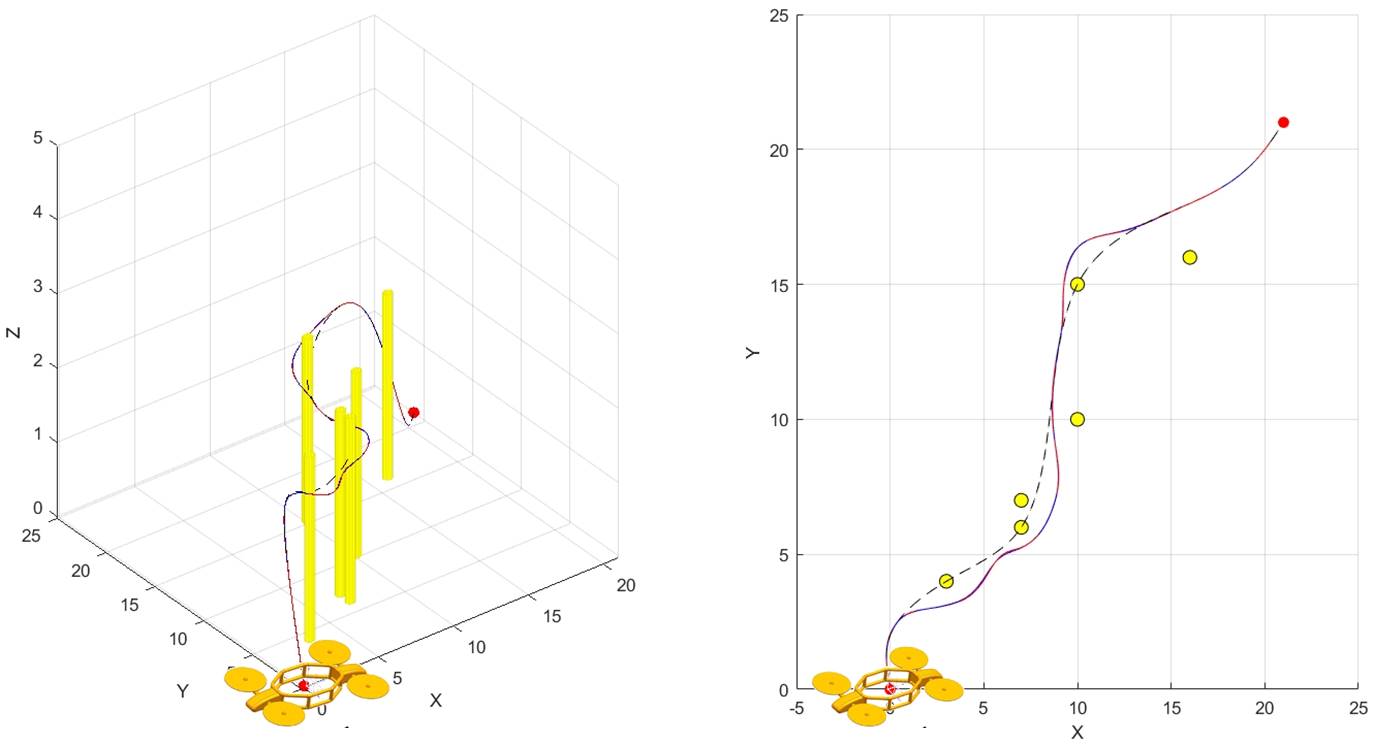
3D Obstacle Clouding and Collision Avoidance Path Planning using Stereo Camera (HMC project)

- Flying Car
- Application of technology spin-off from space technology to Flying car
- Novel design for emergency landing of Flying car
- New deployable wing structure design based on Space technoloty
- Tracking control of Flying car
Sponsor: Hyundai Motor Company
Collision-avoided Model Predictive Control (MPC) <click for video streaming>