Mobility Control
Our research interests are in the mechanism, embedded system, dynamics and control of smart mobility vehicle. Dynamic model-based optimal control with sensor fusion and CFRP based Design and manufacturing are investigated for future smart mobility such as Autonomous vehicle, Flying car and Spacecraft. Our goal is to analyze those systems in virtual space and make real propotypes with novel sensors, artificial neural network algorithms and composite structure.
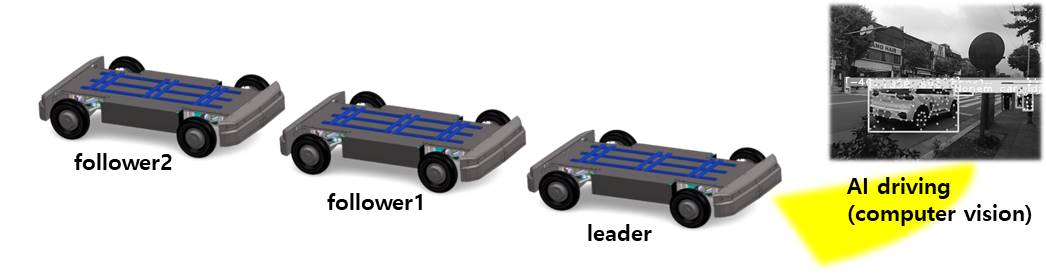
- Autonomous Group Driving (Platooning) Platform
- Vehicle dynamics based system design/modelling
- Group driving control for lateral/longitudinal motion of In-wheel driven autonomous platform
- Stereo cam-based local path planning for autonomous platooning
- GPS based global path planning and path tracking control
Sponsor: Hyundai Motor Company
Leader-folling Control Algorithm for Platooning (HMC project) <click for video streaming>

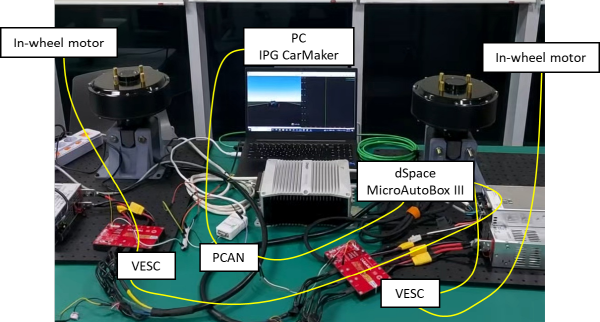
- Hardware-In-The-Loop (HILS) Implementation for In-wheel driven Mobility Control
- HILS implementation for autonomous mobility
- Real-time interaction among IPG CarMAker/ dSpace ASM software, dSpace MicroAutoBox hardware and Simulink mobility model
Sponsor: IPG, dSpace and UIC
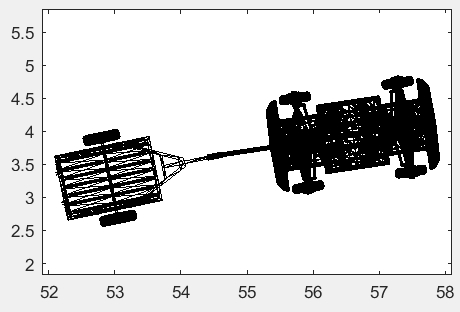
- Torque Vectoring Control of Smart Trailer Platform
- Vehicle dynamics based system design/modelling
- Optimal yaw control for lateral/longitudinal motion of In-wheel driven Trailer
- Autonomous driving trailer
Sponsor: Hyundai Motor Company

Torque Vectoring Control of Smart Trailer (HMC project) <click for video streaming>
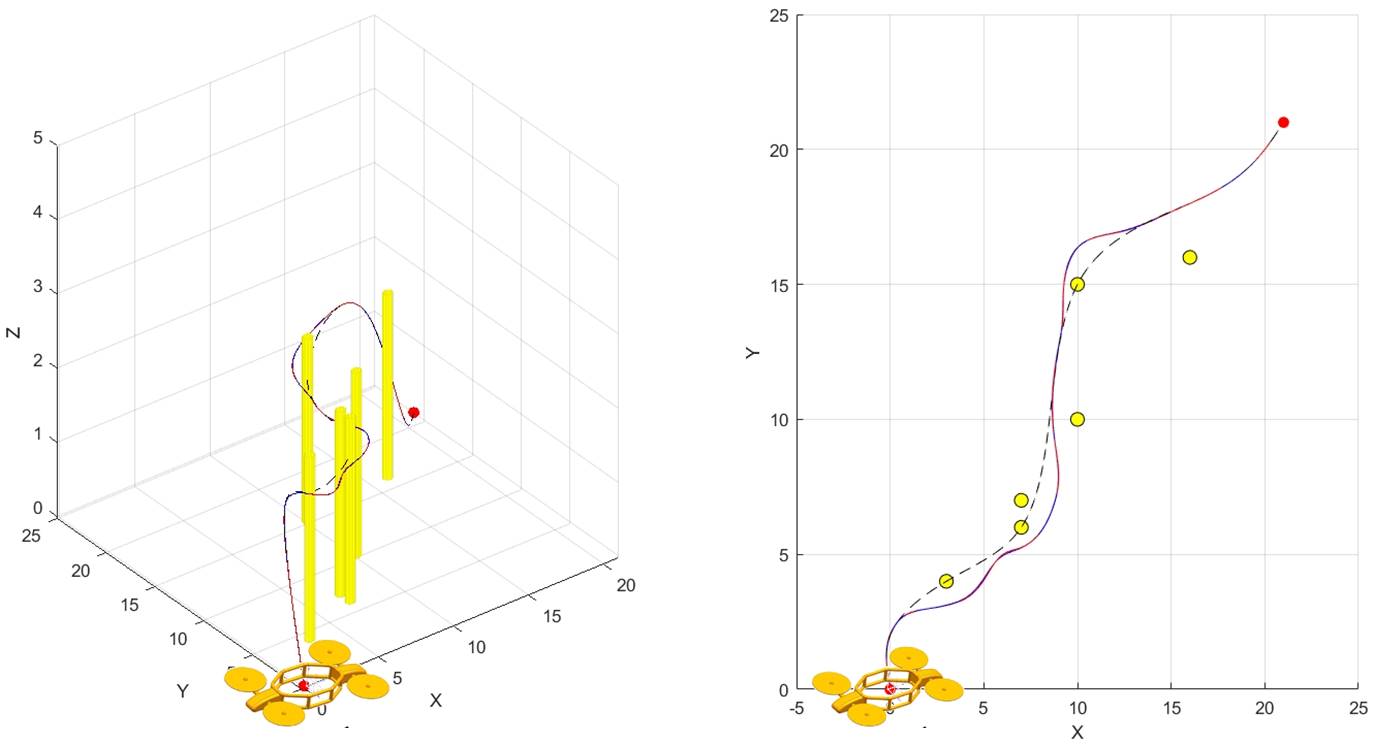
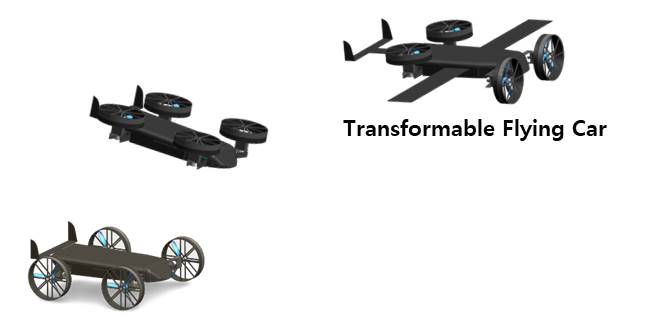
- Flying Car
- Application of technology spin-off from space technology to Flying car
- Novel design for transformation between ground vehicle and UAV
- New deployable wing structure design based on Space technoloty
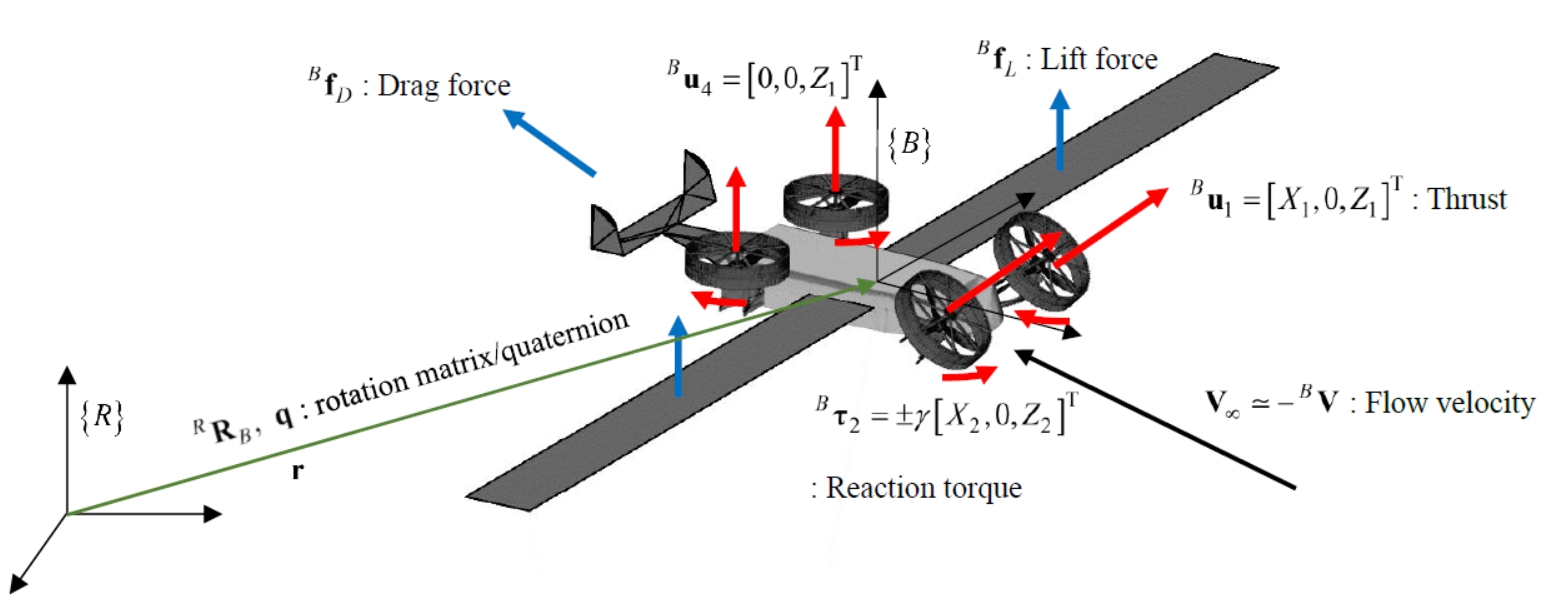
- Attitude and tracking control of Flying car
- Transient control of tilted rotor of Flying car
Tracking control of a ground vehicle-transformable VTOL with rollable CFRP wing (Lyapunov-function / Sliding mode control) <click for video streaming>
Fault tolerance control <click for video streaming>
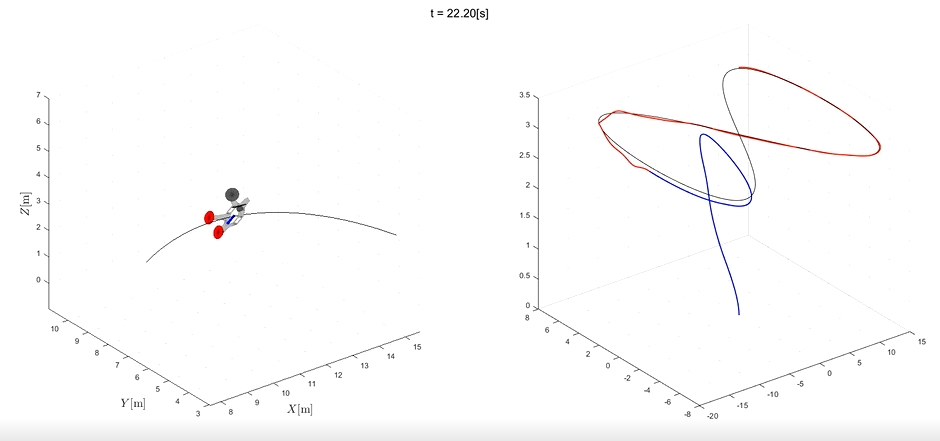
Collision-avoided Model Predictive Control (MPC) <click for video streaming>